生物机混合机器人能源供应综述
生物机混合机器人(BHR)代表了新一代微型飞行器,通过在生物系统和人工系统之间建立接口来进行控制。与传统仿生机器人相比,它们没有复杂的机械结构,并且由于直接采用动物身体,因此具有优越的运动特性和较低的能量需求。因此,BHR可以应用于许多重要场景,例如城市和荒野救援行动、环境监测和危险区域调查。
为了完成长时间的任务续航能力,必须考虑控制背包的能量供应。由于不同的生物载体对能源设备的要求不同,BHR的供电是一个重要问题。北京理工大学科学家发表的一篇综述论文总结了 BHR 供应装置研究的进展。
这篇新综述论文于9月26日发表在《Cyborg and Bionic Systems》杂志上,全面概述了BHR研究中的各种供能方法,从不同生物载体化学电池的选择到各种不同能源的开发和应用。能量采集器。
“你可能无法想象,有一天,当你被困在野外时,第一个注意到你的求救信息并营救你的人是一只动物。但这将在未来成为现实。” 研究作者、北京理工大学教授赵杰良解释道。
长期以来,仿生科学家一直期望能够模仿造物主巧妙的生物设计和构造。尽管科学家们已经设计和制造了机器人以各种可能的方式模仿自然界中动物的运动,但还没有仿生机器人能够与动物身体本身的效率和可操作性相媲美。
生物机混合机器人(BHR)已成为另一种新方法。BHR 使用动物作为载体,通过构建生物机械接口来调节载体运动,以完成特定场景的任务。赵说,为BHR携带的控制背包和电子元件供电的能源供应装置决定了其未来的发展和实际应用。
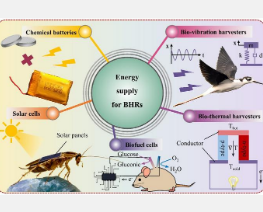
新发表的综述分析了 BHR 研究中的各种能源供应方法。研究作者将能源供应设备分为五类:化学电池;太阳能电池; 生物燃料电池;生物热收割机和生物振动收割机。他们分别分析了不同载体动物在化学电池选择上的侧重点。例如,在选择飞虫电池时,除了满足基本的电气要求外,还需要考虑整个电池的重量和尺寸,以保证载体昆虫能够正常飞行。
尽管电池的尺寸越来越小,但它们无法为BHR提供可持续的能源,而且频繁充电会影响动物的生活。因此,一些研究人员开始开发太阳能电池、生物燃料电池、生物热能收集器和生物振动能量收集器来为BHR提供能量。在评论中,它们包含了 BHR 自供电设备当前研究的摘要概述。赵说:“能量采集器可以有效地从周围环境或动物本身采集不同形式的能量,从而实现BHR的自供电。”
展望未来,团队认为需要克服五个重要挑战。一是开发高能量密度能源供应装置。他们认为,随着新材料的产生和微纳米技术的进步,复合材料和微尺度结构设计为提高能量密度提供了主要方向。
第二个是开发能量供应装置的生物相容性,以避免可能影响动物寿命的严重免疫反应。三是复合能源供给。通过合理采集多种环境能源,应用多种能量转换机制,可以有效提高供能装置的空间利用效率,提高发电量。
第四个是能源供应的稳定性,因为能源供应系统的长期稳定是有效控制BHR的基本要求。最后一个是环保能源供应。由于 BHR 在自然环境中使用,解决能源供应系统对环境的影响是一项重大挑战。
“BHR能源供应研究领域仍处于起步阶段,”赵说。大多数研究仅在实验室中进行,收割机的产量低于实际需求。BHR作为新型概念机器人,在动物监测、野生动物救援等未来场景中具有重要的应用前景。能源供应系统直接决定了BHR的实际应用。本次综述呼吁更多的研究人员能够关注这一领域,共同努力克服能源供应方面的挑战,推动BHRs的实际应用。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!