研究人员提出了一种基于深度神经网络的四象限模拟太阳传感器校准
航天器可以通过将来自姿态传感器的外部测量值与参考信息进行比较来估计姿态状态。考虑到卫星体积和有效载荷的限制,CubeSats倾向于使用具有极低功耗、最小体积、低复杂度、低成本和高可靠性等优点的四象限模拟太阳传感器作为姿态传感器。校准程序和补偿模型可以显着提高传感器的性能。然而,影响四象限太阳敏感器标定的误差源多种多样,导致补偿模型建立过程复杂。近年来广泛应用于航空航天领域的深度学习能够在有界闭集上逼近任意连续函数,为解决传统问题提供新思路。在最近发表在《Space: Science & Technology》上的一篇研究论文中,来自西北工业大学、德国航天中心和大连理工大学的作者共同提出了一种通过深度学习来校准太阳传感器的方法,该方法不仅能够整合各种错误,但也避免了分析和建模每个错误的需要。
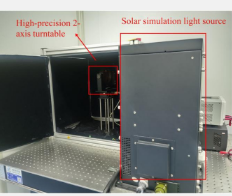
作者首先阐述了基于立方曲面拟合的太阳敏感器的标定过程。太阳敏感器标定测试平台包括太阳模拟光源、高精度二轴转台、伺服控制器。太阳传感器的输出是入射角λ 和方位角υ,其理论值是从转盘的角度获得的,实际值是通过太阳传感器测量的。理论值与实际值误差较大,可达3°(见图6)。将理论值和实际值代入三阶曲面拟合公式,得到立方曲面拟合模型。模拟太阳敏感器的输出值通过立方曲面拟合模型进行校正,有效降低了误差(见图7)。但是,靠近太阳传感器的 FOV(视场)边缘存在较大误差。
然后,作者介绍了逼近实际误差模型并用于纠错的深度神经网络模型的学习和训练。在模拟太阳敏感器的标定实验中,选择深度前馈神经网络来拟合误差模型,其中选择ReLU(线性整流函数)作为激活函数,全连接作为2个相邻层之间的连接方式,以及均方误差 (MSE) 作为损失函数。神经网络通过梯度下降算法和反向传播算法进行训练。
最后,利用实验数据验证了所提算法的有效性。在模拟太阳敏感器的标定实验中,网络模型的训练分为两个阶段:初始训练阶段由立方曲面拟合模型生成数据集,深度网络模型在后期采用实测数据进行学习。最后的训练阶段。此外,学习数据通过 max-min 方法归一化为 0 和 1 之间的大小。经过初始阶段的网络学习,网络模型的输出与立方曲面拟合模型的估计值的误差集中在0.02°以内,说明此时的深度网络模型可以更好地映射立方曲面拟合模型. 在前馈神经网络模型的最后训练阶段,入射角标定误差可达0.1°(1σ)和0.25°(3σ),大大提高了立方曲面拟合模型的标定效果。这些结果表明,该方法可以有效地消除确定性误差,包括点失真和装配误差。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!