一种利用深度陀螺仪传感器进行人脸方向估计的有效方法
近年来,人工智能在多种技术的发展和进步方面展现出了巨大的潜力。面部方向估计就是一个很好的例子,它可应用于防止分心驾驶的驾驶员辅助系统、防止答案 作弊的方法以及创建三维 (3D) 虚拟化身的软件。
传统的面部方向估计技术识别面部的特征部分,包括鼻子、眼睛和嘴巴,并检测它们的运动。然而,这种基于二维(2D)图像的方法会引起隐私问题,并且当面部特征因掩模而被隐藏或面部转向侧面时会失败。解决方案可能在于使用点云数据(从一组离散数据点获得的数据)和深度传感器来优化面部检测。事实上,之前的一些研究已经采用了基于5个人脸方向3D点云数据深度学习的估计模型:正面、对角正面、右、左和水平。然而,考虑到驾驶辅助系统所需的准确度水平对验证驾驶员的状态至关重要,
为了解决这一限制,芝浦工业大学工程与科学研究生院 Chinthaka Premachandra 教授领导的科学家们开发了一种更精确的水平宽范围角度检测方法(k > 5)。他们在使用陀螺仪传感器获取训练数据的过程中精确测量了面部的水平角度。他们的论文于 2023 年 7 月 21 日在线发表在IEEE Sensors Journal上。
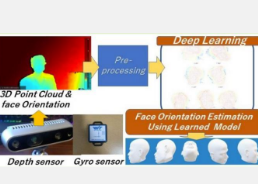
在这项研究中,科学家们使用深度传感器收集了来自不同方向的点云数据,该深度传感器在数据收集过程中与陀螺仪传感器集成。该数据用于训练基于深度学习的分类模型,该模型用于面部方向估计。科学家们将面部相对于相机的水平角度从 +90 度更改为 -90 度,步长分别为 30 度、22.5 度、18 度和 15 度。结果,人脸方向的分类由七个以上的类别表示(k = 7、9、11、13)。
“通过深度和陀螺仪传感器的集成获得每个方向的精确训练数据,这减少了构建分类模型所需的点云样本数量。此外,应用减重过程来减少点云数据的权重,提高了训练效率,并实现了快速的面部方向估计。” Premachandra 教授解释道。
所提出的分类方法专为七个以上类别而设计,通过深度学习在人脸方向检测中取得了显着的性能。例如,它对 7、9 和 11 类的分类准确率分别超过 98%、95% 和 91%,这比传统的人脸方向估计技术有了显着改进。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!