受结启发的光学传感器用于灵巧机器人操作中的滑动检测和摩擦测量
手具有令人惊叹的能力,可以非常准确地感知摩擦力,这一切都要归功于皮肤内的机械感受器。这种天赋使人能够灵活地处理物体和毫不费力地使用工具,为日常生活注入令人愉快的灵活性。但如果这种触觉能力可以在机器人身上发挥出来呢?
想象一个机器人拥有检测和理解摩擦和滑动的不可思议能力的世界,就像我们一样。这一诱人的概念推动了对灵活触觉检测的追求,这是一个尖端领域,旨在为机器人配备类似于我们自己的触觉。通过巧妙地应对错综复杂的摩擦环境,机器人可以精确而优雅地完成各种操作。
尽管已经取得了长足的进步,但柔性 3D 力传感器的开发仍处于研究阶段。与基于刚性梁的同类传感器不同,这些传感器具有令人难以置信的前景,能够适应各种表面并执行需要技巧的任务。然而,研究人员仍在努力应对复杂结构、错综复杂的解耦方法和不一致性能的挑战。
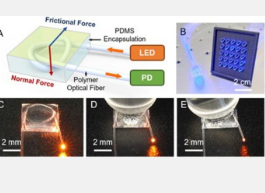
从结中汲取灵感,一个有趣的想法出现了——聚合物光纤结。结的三维结构打破了纤维原有的圆形对称性,重新分配了纤维表面的载荷。反过来,这使得单个纤维单元能够对来自不同方向的力刺激做出独特的响应,从而有望创建复杂的 3D 力传感设备。
聚合物光纤具有许多优点:紧凑、坚固、简化的制造工艺和成本效益。这项研究揭示了它们对定向力的响应,并展示了它们在 3D 力测量方面的潜力。基于这些知识,精心设计并实现了一系列纤维结,从而实现了成功的 3D 力检测。通过将这些传感器集成到机器人的指尖,可以获取包括压力、摩擦和滑动在内的触觉信息。机械手可以利用这种智能来完美地执行高级任务,例如自适应抓取和工具操作。
这项工作引入了一种通过结和光纤的组合构建 3D 力传感器的新策略。通过分析结的结构力学,研究人员成功提高了压力、摩擦和滑动的传感性能。这种方法简化了系统复杂性并克服了与信号解耦相关的计算挑战。
变化点检测算法的集成可以实现实时数据处理和选择,从而形成用于机器人操纵的触觉反馈系统。该系统测量法向力和剪切力,并检测滑动,使机器人能够自适应地抓取物体和操纵工具。本文中介绍的演示包括自适应抓取移动物体以及用两指机器人手灵巧地操作刀和钥匙。
聚合物光纤的使用使得结传感器轻便、灵活且廉价。传感器的非金属特性使其不受电磁干扰。制造工艺简单,不需要复杂的微纳加工技术,大大降低了传感器的生产门槛。
此外,聚合物光纤不仅充当传感元件,还充当信号传输通道。这一特性简化了传感器阵列的信号采集过程,有利于系统集成。此外,单根聚合物光纤可用于创建多个光纤结,从而通过结合功能材料或多波长信号复用等策略来实现附加功能。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!