简单的神经网络在控制机器人假肢方面优于更复杂的系统
密歇根大学的研究人员表明,受人体自然神经回路启发的人工神经网络可以让灵长类动物更快、更准确地控制大脑控制的假手和手指。对于那些处理失去肢体或瘫痪的人来说,这一发现可能会让他们对先进的假肢有更自然的控制。
工程师和医生团队发现,与不使用神经网络的传统算法相比,前馈神经网络在控制机器人手指期间将峰值手指速度提高了 45%。这推翻了一个假设,即需要更复杂的神经网络,如机器学习其他领域中使用的神经网络,才能实现这种水平的性能改进。
“这个前馈网络代表了一种更古老、更简单的架构——信息只在一个方向上移动,从输入到输出,”UM 生物医学工程副教授、该论文的通讯作者 Cindy Chestek 博士说。在《自然通讯》中。
“因此,看到它如何胜过更复杂的系统,我们感到有些惊讶。我们认为前馈系统的简单性使用户能够拥有更直接和直观的控制,这可能更接近人体的自然运作方式”
精细运动技能对人类来说极其重要,而这种功能的丧失对瘫痪患者来说可能是毁灭性的,第一作者,密歇根大学医学博士,医学博士,密歇根医学功能神经外科研究员 Matthew Willsey 说。
“我们非常有动力使用最新的机器学习技术来解释大脑的神经活动,以控制灵巧的手指运动,”Willsey 说。“我们希望这项工作可以帮助那些失去运动的人恢复精细的运动功能。”
先进的假肢和脑机接口有望让那些因脊髓损伤、中风或其他损伤和疾病而瘫痪的人恢复人手的精确控制。但是,以速度和精度重建人类思维与机器人假肢之间的自然交流仍然是一个绊脚石。
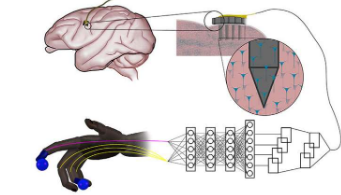
例如,在脊髓损伤中,人造神经网络可以重建大脑和脊髓之间被切断的连接,方法是使用电极捕捉来自大脑的冲动,用人工智能解释它们,并用它来控制假手或使原生手恢复活力肢。
但在计算中,前馈神经网络模型被认为对于许多使用递归神经网络的高级应用程序来说并不那么强大。循环网络中的节点不是沿着单向过程传递输入,而是拥有自己的动态——通过反馈创建自己的内部循环的能力,使它们能够记忆和重放序列。当你根据先前记录的神经数据预测运动时,这种方法非常有效,让一些专家认为这在新实验中会保持不变。
Chestek 说,实际上,用于直接电机控制的循环网络的复杂性似乎“与用户作对”。
“在人体的运动皮层和手部运动之间,只有几个神经元和几个突触,”她说。“那里不需要大量的处理,前馈神经网络可能更类似于自然系统。”
该团队希望他们的发现将有助于推动未来的研究,以提高高级假肢对大脑冲动做出反应的速度和准确性。
“在开发这种算法时,我们试图坚持爱因斯坦著名的设计原则,即‘一切都应该尽可能简单,但不能太简单,’”Willsey 说。
“我们的算法需要足够复杂,才能理解大脑电信号与用户预期手指运动之间可能存在的非线性关系。但是,该算法有朝一日可能成为完全植入式脑机接口系统的一部分,该系统可以恢复对瘫痪者的移动以及不必要的复杂性可能会以不良方式对这些未来系统造成压力,例如缩短电池寿命。”
“在密歇根大学,我们很幸运拥有一大批工程师、神经科学家和运动专家,他们在合作文化中共同合作,推动恢复性神经工程领域向前发展,”医学博士 Parag Patil 说。 ., 该研究的资深作者和密歇根大学医学院神经外科副教授。“这项工作的部分令人兴奋之处在于,这些算法几乎可以立即转化为床边,以造福于人类研究患者。”
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!