新算法防止无人机在半空中相撞
当多架无人机在同一个空域协同工作时,可能会在玉米田上喷洒杀虫剂,它们可能会相撞。
为了帮助避免这些代价高昂的事故,麻省理工学院的研究人员在 2020 年推出了一个名为 MADER 的系统。这种多代理轨迹规划器使一组无人机能够制定最佳的、无碰撞的轨迹。每个代理广播其轨迹,以便其他无人机知道它计划去哪里。然后,代理在优化自己的轨迹时会考虑彼此的轨迹,以确保它们不会发生碰撞。
但是当团队在真实无人机上测试该系统时,他们发现如果无人机没有关于其伙伴轨迹的最新信息,它可能会无意中选择导致碰撞的路径。研究人员改进了他们的系统,现在正在推出 Robust MADER,这是一种多智能体轨迹规划器,即使在智能体之间的通信延迟时也能生成无碰撞轨迹。
“MADER 在模拟中表现出色,但尚未在硬件中进行测试。所以,我们建造了一堆无人机并开始飞行。无人机需要相互交谈以共享轨迹,但一旦你开始飞行,你很快就会意识到通信延迟总是会导致一些故障,”航空航天研究生 Kota Kondo 说。
该算法包含一个延迟检查步骤,在此过程中,无人机会等待一段特定的时间,然后才能执行新的优化轨迹。如果它在延迟期间从其他无人机接收到额外的轨迹信息,它可能会放弃它的新轨迹并重新开始优化过程。
当 Kondo 和他的合作者在真实无人机的模拟和飞行实验中测试 Robust MADER 时,它在生成无碰撞轨迹方面取得了 100% 的成功率。虽然无人机的飞行时间比其他一些方法慢一点,但没有其他基线可以保证安全。
“如果你想飞得更安全,你就得小心,所以如果你不想撞到障碍物,你就会花更多的时间到达目的地,这是合理的。如果你撞到什么东西,无论你走得多快,都没有关系,因为你不会到达目的地,”近藤说。
Kondo 与博士后 Jesus Tordesillas 共同撰写了这篇论文;Parker C. Lusk,研究生;Reinaldo Figueroa、Juan Rached 和 Joseph Merkel,麻省理工学院本科生;和资深作者 Jonathan P. How,Richard C. Maclaurin 航空航天学教授和 MIT-IBM Watson AI 实验室的成员。该研究将在机器人与自动化国际会议上发表。
规划轨迹
MADER 是一个异步的、分散的、多代理的轨迹规划器。这意味着每架无人机都制定了自己的轨迹,虽然所有代理必须就每条新轨迹达成一致,但他们不需要同时达成一致。这使得 MADER 比其他方法更具可扩展性,因为成千上万的无人机很难同时就轨迹达成一致。由于其去中心化的特性,该系统在无人机可能飞离中央计算机很远的现实环境中也能更好地工作。
借助 MADER,每架无人机都使用一种算法优化新轨迹,该算法结合了从其他代理那里收到的轨迹。通过不断优化和广播它们的新轨迹,无人机避免了碰撞。
但也许一个代理人在几秒钟前分享了它的新轨迹,但由于通信延迟,另一个代理人没有立即收到它。在现实环境中,信号通常会因其他设备的干扰或暴风雨天气等环境因素而延迟。由于这种不可避免的延迟,无人机可能会无意中走上一条新的轨迹,从而使其进入碰撞过程。
Robust MADER 可以防止此类碰撞,因为每个代理都有两个可用轨迹。它保留一条它知道是安全的轨迹,它已经检查过潜在的碰撞。在遵循原始轨迹的同时,无人机优化了一条新轨迹,但在完成延迟检查步骤之前不会提交新轨迹。
在延迟检查期间,无人机会花费固定的时间反复检查来自其他代理的通信,以查看其新轨迹是否安全。如果它检测到潜在的碰撞,它会放弃新的轨迹并重新开始优化过程。
近藤说,延迟检查期的长短取决于代理人之间的距离和可能阻碍通信的环境因素。例如,如果代理相距很远,则延迟检查时间就需要更长。
完全无碰撞
研究人员通过运行数百次模拟来测试他们的新方法,在这些模拟中他们人为地引入了通信延迟。在每次模拟中,Robust MADER 都 100% 成功地生成了无碰撞轨迹,而所有基线都导致了碰撞。
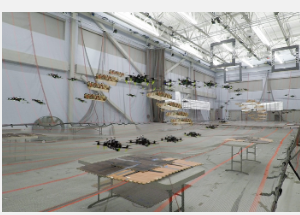
研究人员还建造了六架无人机和两个空中障碍物,并在多代理飞行环境中测试了 Robust MADER。他们发现,虽然在此环境中使用原始版本的 MADER 会导致七次碰撞,但 Robust MADER 在任何硬件实验中都不会导致一次崩溃。
“在你实际驾驶硬件之前,你不知道什么可能会导致问题。因为我们知道模拟和硬件之间存在差异,所以我们使算法具有鲁棒性,因此它可以在实际的无人机中运行,并且在实践中看到它是非常有益的,”Kondo 说。
使用 Robust MADER,无人机能够以每秒 3.4 米的速度飞行,尽管它们的平均飞行时间比某些基线略长。但没有其他方法在每个实验中都能完全避免碰撞。
未来,Kondo 和他的合作者希望在户外对 Robust MADER 进行测试,因为许多障碍和类型的噪音都会影响通信。他们还想为无人机配备视觉传感器,以便它们能够检测其他代理人或障碍物、预测它们的运动,并将该信息纳入轨迹优化。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
2025年6月20日,——在世界文化遗产地河南洛阳的光影流转之间,2025年新浪微博旅游之夜盛大举行。作为国内首个...浏览全文>>
-
2025年6月20日,——在世界文化遗产地河南洛阳的光影流转之间,2025年新浪微博旅游之夜盛大举行。作为国内首个...浏览全文>>
-
QQ多米试驾线下预约活动为了让更多用户感受QQ多米的独特魅力,我们特别推出了线下试驾预约活动。这不仅是一次...浏览全文>>
-
阜阳长安启源A07以其卓越的性能和豪华配置吸引了众多消费者的目光。作为一款定位高端市场的新能源车型,长安启...浏览全文>>
-
【安徽淮南大众CC新车报价2025款大公开】大众CC作为一款兼具运动感与豪华质感的轿跑车型,一直深受消费者喜爱...浏览全文>>
-
2025款长安猎手K50在安徽淮南地区的最新价格已新鲜出炉,为准备购车的朋友带来全面解析。这款车型以其高性价比...浏览全文>>
-
在安徽滁州购买长安猎手K50时,了解其落地价和省钱技巧至关重要。长安猎手K50是一款实用性强的皮卡车型,适合...浏览全文>>
-
途锐新能源是大众旗下的一款高端插电混动SUV,目前在安徽阜阳地区有售。其官方指导价约为58万元起,但实际成交...浏览全文>>
-
2025款大众CC作为一款兼具运动与豪华的中型轿车,备受关注。目前市场指导价大约在25万至35万元之间,具体价格...浏览全文>>
-
2024款探岳X作为一款备受关注的中型SUV,在市场上以其时尚的设计和出色的性能吸引了众多消费者。根据最新市场...浏览全文>>
- QQ多米试驾线下预约
- 安徽滁州长安猎手K50落地价,买车省钱秘籍
- 淮南大众CC新款价格2025款多少钱?买车攻略一网打尽
- 瑞虎8 PRO试驾,畅享豪华驾乘,体验卓越性能
- 安徽阜阳长安启源A05多少钱 2025款落地价,换代前的购车良机,不容错过
- 保时捷Macan试驾的流程是什么
- 安徽淮南大众ID.3多少钱?购车攻略在此
- 阜阳揽巡落地价,豪华配置超值价来袭
- 安徽池州威然 2024新款价格与配置的完美平衡
- 奇瑞瑞虎9试驾,新手必知的详细步骤
- QQ多米价格,换代前的购车良机,不容错过
- 池州迈腾GTE新款价格2022款多少钱?选车秘籍与优惠全公开
- 岚图追光多少钱 2024款落地价走势,近一个月最低售价25.28万起,性价比凸显
- 天津滨海威然 2024新款价格,最低售价28.98万起,入手正当时
- 蚌埠途昂新款价格2025款多少钱?购车必看
- 坦克400预约试驾全攻略
- 天津滨海ID.7 VIZZION价格,各配置车型售价全揭晓,性价比之王
- 安庆帕萨特最新价格2025款,最低售价12.35万起,入手正当时
- 亳州宝来新款价格2025款多少钱?选车指南与落地价全解析
- 生活家PHEV 2025新款价格,最低售价63.98万起现在该入手吗?