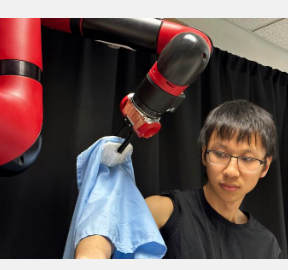
卡内基梅隆大学机器人一次穿上衬衫的袖子
大多数人认为穿衣服是理所当然的。但国家卫生统计中心的数据显示,92% 的护理机构居民和家庭护理患者在穿衣方面需要帮助。
卡内基梅隆大学机器人研究所(RI) 的研究人员看到了机器人可以帮助满足这一需求的未来,并正在努力使其成为可能。
RI 博士 Yufei Wang 表示:“值得注意的是,现有的机器人辅助穿衣工作主要假设穿衣时手臂姿势范围有限,并且使用一件固定的衣服,例如医院的病号服。” 学生正在研究机器人辅助穿衣系统。“开发一个通用系统来解决各种日常服装和不同的运动功能能力是我们的首要目标。我们还希望将该系统扩展到具有不同程度的手臂运动受限的个人。”
机器人辅助穿衣系统利用人工智能的能力来适应各种人体形状、手臂姿势和服装选择。该团队的研究使用强化学习(完成某些任务的奖励)来实现他们的通用着装系统。具体来说,每次机器人正确地将衣服沿着人的手臂放置得更远时,研究人员都会给予机器人积极的奖励。通过持续强化,他们提高了系统学习着装策略的成功率。
研究人员通过模拟来教机器人如何操纵衣服和给人们穿衣服。当将模拟中学到的策略转移到现实世界时,团队必须仔细处理服装材料的属性。
“在模拟阶段,我们故意采用随机化的不同服装属性来指导机器人学习的着装策略,以涵盖广泛的材料属性,”参与该项目的 RI 硕士生 Zhanyi Sun 说道。“我们希望模拟中随机变化的服装属性能够封装现实世界中服装的属性,这样在模拟环境中学到的着装策略就可以无缝地转移到现实世界中。”
RI 团队在一项人体研究中评估了机器人穿衣系统,对 17 名具有不同体型、手臂姿势和五件衣服的参与者进行了 510 次穿衣试验。对于大多数参与者来说,系统能够将每件衣服的袖子完全拉到他们的手臂上。对所有测试用例进行平均后,系统覆盖了参与者手臂长度的 86%。
研究人员在设计系统时必须考虑几个挑战。首先,衣服本质上是可变形的,这使得机器人很难感知整件衣服并预测它会移动到哪里以及如何移动。
“衣服与能够进行状态估计的刚性物体不同,因此我们必须对可变形物体使用高维表示,以便让机器人感知衣服的当前状态以及它们如何与人类手臂互动,”王说。“我们使用的表示称为分段点云。它将衣服的可见部分表示为一组点。”
安全的人机交互也至关重要。重要的是,机器人应避免对人的手臂施加过大的力以及任何可能导致不适或危及个人安全的其他行为。为了降低这些风险,团队奖励了机器人的温和行为。
未来的研究可能会朝几个方向发展。例如,该团队希望扩展当前系统的功能,使其能够将夹克穿在人的双臂上或将 T 恤套在头上。这两项任务都需要更复杂的设计和执行。该团队还希望能够适应人类在穿衣过程中的手臂动作,并探索更先进的机器人操作技能,例如扣扣子或拉拉链。
随着工作的进展,研究人员打算在护理机构内进行观察性研究,以深入了解个人的多样化需求以及当前辅助敷料系统需要进行的改进。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
2025年6月20日,——在世界文化遗产地河南洛阳的光影流转之间,2025年新浪微博旅游之夜盛大举行。作为国内首个...浏览全文>>
-
2025年6月20日,——在世界文化遗产地河南洛阳的光影流转之间,2025年新浪微博旅游之夜盛大举行。作为国内首个...浏览全文>>
-
QQ多米试驾线下预约活动为了让更多用户感受QQ多米的独特魅力,我们特别推出了线下试驾预约活动。这不仅是一次...浏览全文>>
-
阜阳长安启源A07以其卓越的性能和豪华配置吸引了众多消费者的目光。作为一款定位高端市场的新能源车型,长安启...浏览全文>>
-
【安徽淮南大众CC新车报价2025款大公开】大众CC作为一款兼具运动感与豪华质感的轿跑车型,一直深受消费者喜爱...浏览全文>>
-
2025款长安猎手K50在安徽淮南地区的最新价格已新鲜出炉,为准备购车的朋友带来全面解析。这款车型以其高性价比...浏览全文>>
-
在安徽滁州购买长安猎手K50时,了解其落地价和省钱技巧至关重要。长安猎手K50是一款实用性强的皮卡车型,适合...浏览全文>>
-
途锐新能源是大众旗下的一款高端插电混动SUV,目前在安徽阜阳地区有售。其官方指导价约为58万元起,但实际成交...浏览全文>>
-
2025款大众CC作为一款兼具运动与豪华的中型轿车,备受关注。目前市场指导价大约在25万至35万元之间,具体价格...浏览全文>>
-
2024款探岳X作为一款备受关注的中型SUV,在市场上以其时尚的设计和出色的性能吸引了众多消费者。根据最新市场...浏览全文>>
- QQ多米试驾线下预约
- 安徽滁州长安猎手K50落地价,买车省钱秘籍
- 淮南大众CC新款价格2025款多少钱?买车攻略一网打尽
- 瑞虎8 PRO试驾,畅享豪华驾乘,体验卓越性能
- 安徽阜阳长安启源A05多少钱 2025款落地价,换代前的购车良机,不容错过
- 保时捷Macan试驾的流程是什么
- 安徽淮南大众ID.3多少钱?购车攻略在此
- 阜阳揽巡落地价,豪华配置超值价来袭
- 安徽池州威然 2024新款价格与配置的完美平衡
- 奇瑞瑞虎9试驾,新手必知的详细步骤
- QQ多米价格,换代前的购车良机,不容错过
- 池州迈腾GTE新款价格2022款多少钱?选车秘籍与优惠全公开
- 岚图追光多少钱 2024款落地价走势,近一个月最低售价25.28万起,性价比凸显
- 天津滨海威然 2024新款价格,最低售价28.98万起,入手正当时
- 蚌埠途昂新款价格2025款多少钱?购车必看
- 坦克400预约试驾全攻略
- 天津滨海ID.7 VIZZION价格,各配置车型售价全揭晓,性价比之王
- 安庆帕萨特最新价格2025款,最低售价12.35万起,入手正当时
- 亳州宝来新款价格2025款多少钱?选车指南与落地价全解析
- 生活家PHEV 2025新款价格,最低售价63.98万起现在该入手吗?